chapter six
6 Robot geometry and manipulator kinematics: Building Snackbot
This chapter covers
- Geometric and kinematic robot descriptions
- Individual joint motor control
- Point-to-point (PTP) motions
The previous two chapters provided us with the tools to begin building (virtual) robots: a robotics software framework (ROS) and a robotics simulator (Gazebo).
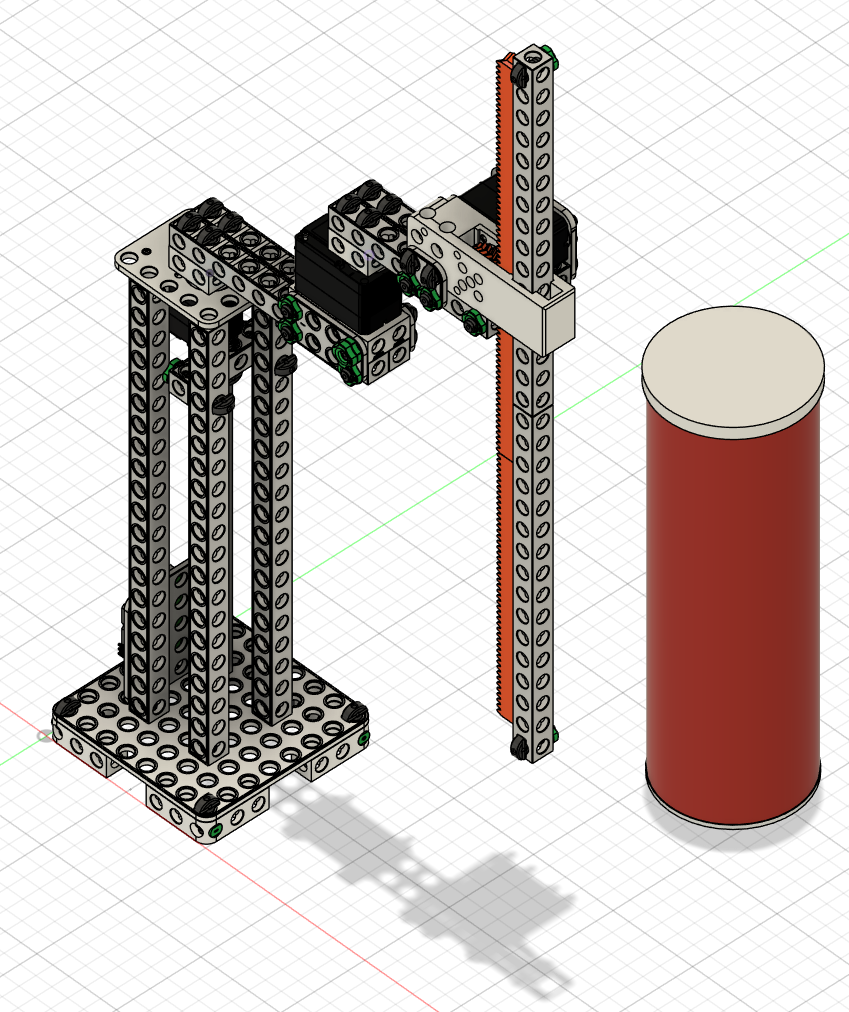
We will now build a simple robot, SnackBot, which ensures we are well energized throughout the book. SnackBot picks up snacks from a known location on a table, a stack of potato chips in a can, and delivers them to another known location, a plate next to our keyboard. It is a three-degree-of-freedom (DoF) manipulator fixed to the table, using electric motors as joint actuators, controlled individually, and moving in point-to-point (PTP) motions. We will look at each of these aspects in turn, starting with modeling the robot in software.
Figure 6.1 CAD model of the 3 DoF SCARA-style SnackBot manipulator, which uses three independently actuated joints to pick up snacks from a chip can and deliver them to a plate.